Симуляція обробки
SprutCAM містить потужний модуль симуляції обробки, який дозволяє моделювати процес обробки деталі на будь-якому верстаті, попередньо створеному на основі його кінематичної схеми і твердотільної моделі. Можливість такого моделювання дозволяє оптимізувати технологію обробки за критеріями трудомісткості, ресурсу інструменту, збереження обладнання та ін. В процесі симуляції користувач візуально контролює весь процес обробки деталі з урахуванням переміщень всіх виконавчих і допоміжних органів верстата. Крім того, система автоматично позначає кадри програми, в яких виявляє зіткнення або недопустимі режими різання.
Комплект поставки SprutCAM містить набір верстатів, що охоплює практично всі типи металорізального обладнання (більше 50 кінематичних схем).
Історично склалося так, що в більшості САМ-систем спочатку розраховують керуючу програму, потім, застосовуючи, як правило, іншу програму, симулюють обробку на верстаті, виявляючи проблеми. Після цього повертаються в САМ-систему, редагують вихідні параметри, перераховують КП, заново симулюють обробку на верстаті і повторюють далі методом проб і помилок, поки не отримають робочу КП.
Недоліки такої схеми очевидні:
- відсутність можливості автоматичної зміни параметрів, які привели до колізій, виявлених на етапі симуляції;
- перенасиченість САМ-системи допоміжними вікнами з параметрами, які правильніше було б отримати з схеми верстата;
- складне, часто неможливе формування тонкого налагодження верстата в процесі розробки КП.
Сучасні тенденції розвитку CAM-систем вимагають глибокої інтеграції ПЗ симуляції з ПЗ генерації керуючих програм Користувач повинен мати можливість контролю обробки деталі безпосередньо з початку розробки КП. Розрахунок траєкторії потрібно відразу проводити з урахуванням параметрів верстата, закладених в кінематичну схему. При розрахунку поточної операції повинна формуватися модель заготовки у вигляді залишкового матеріалу для використання її в наступної операції.
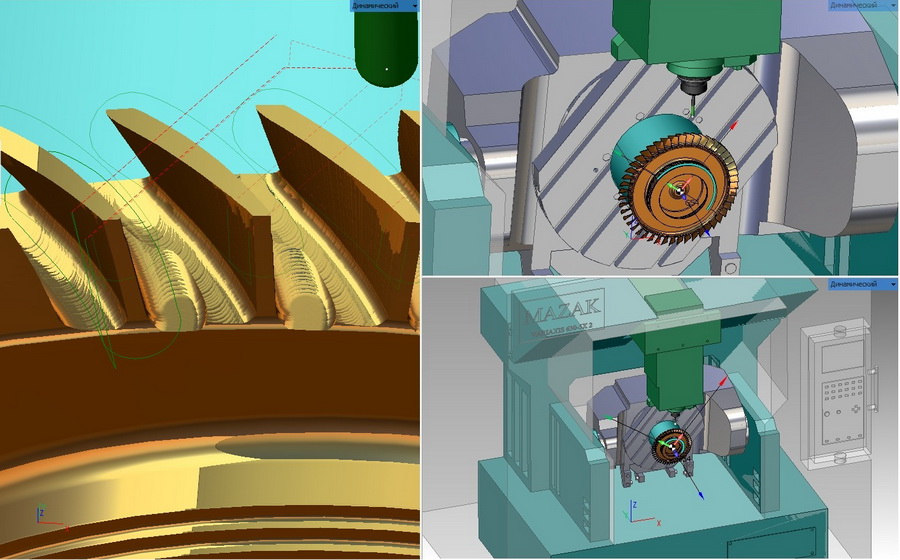
Обробка моноколеса на верстаті Mazak
В SprutCAM вже зараз розрахунок керуючих програм ведеться в робочому просторі верстата від початку роботи, хоча розробники багатьох інших САМ-систем ще тільки роблять певні зусилля для забезпечення інтеграції засобів верифікації та симуляції з ПЗ генерації КП. В момент розрахунку траєкторії переміщення інструменту технолог-програміст відразу бачить верстат, переміщення всіх виконавчих органів верстата, траєкторію переміщення ріжучого інструменту, може контролювати синхронну роботу відразу декількох револьверних або фрезерних головок верстата, бачить результат обробки у вигляді залишкового матеріалу. Багато параметрів верстата, закладених в його схему (наприклад, обмеження переміщень по осях) при розрахунку КП використовуються автоматично.
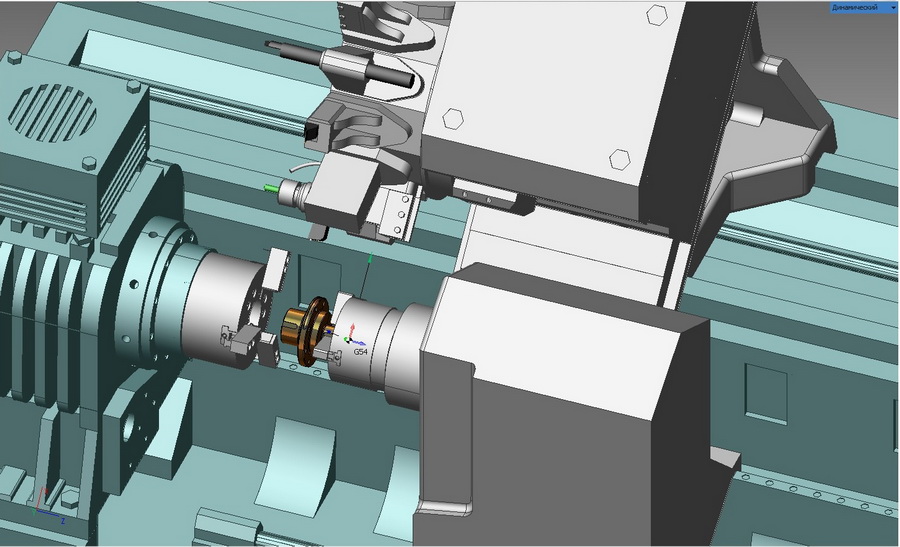
Працюючи в SprutCAM, технолог-програміст вже за комп'ютером виконує роботу наладчика на верстаті, а саме: вибирає з бібліотеки і встановлює в необхідні позиції оснастку; з урахуванням мінімізації часу на зміну інструменту встановлює державки, резцедержкі і блоки осьового інструменту в револьвер; встановлює в державки сам ріжучий інструмент; встановлює заготовку і затискає її в кулачки патрона; підводить задню бабку, проводить установку і затиск люнета та ін. Паралельно цьому система автоматично формує параметри налагодження, такі як виліт заготовки, вильоти ріжучого інструменту по всіх осях, позиції оснастки, люнета, задньої бабки з подальшим виведенням всієї цієї інформації в карту наладки. Налагодження біля верстата зводиться до установки оснащення, заготовки, інструменту в суворій відповідності з параметрами, зазначеними в карті наладки, а також тонкої настройки ріжучого інструменту. Таким чином, для організації реальної симуляції обробки технолог за комп'ютером повинен виконати ту ж роботу, що й наладчик у верстата.
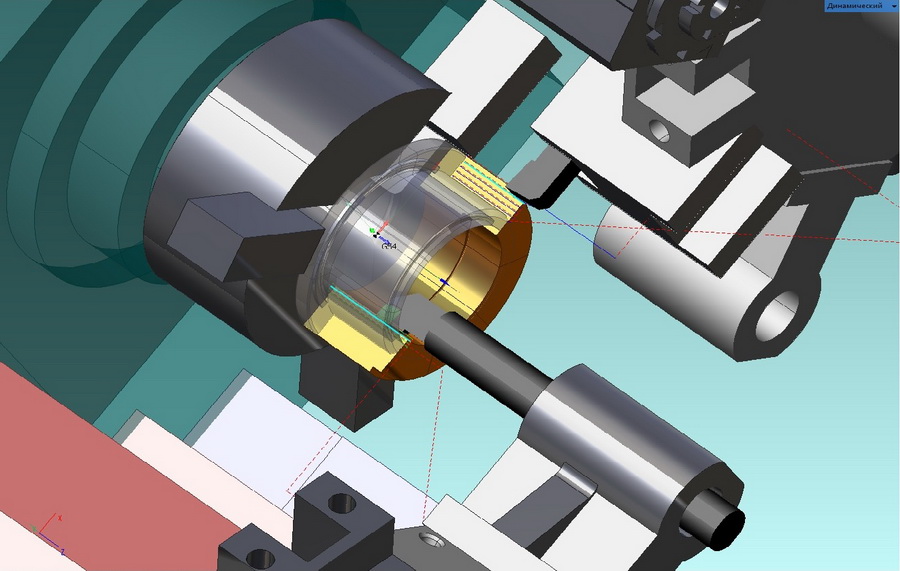
 Симуляція перехоплення деталі в протишпиндель в SprutCAM Симуляція перехоплення деталі в протишпиндель в SprutCAM
Сьогодні все частіше застосовують обробку однієї деталі одночасно двома інструментами або одночасну обробку двох деталей на одному верстаті. Найчастіше технологи вручну вводять команди синхронізації в програму, потім перевіряють результат в сторонніх додатках для моделювання обробки, виявивши помилку вносять зміни в програму, заново перевіряють і так повторюють, поки не отримають придатну програму. В SprutCAM можливість симуляції синхронної обробки вбудована безпосередньо в систему і використовується в процесі формування багатоканальної синхронної обробки. Треба відзначити, що синхронізація проводиться на рівні кадрів, а не операцій, як це зазвичай реалізовано в багатьох відомих САМ-системах.
Приклад одночасної обробки деталі двома інструментами
Враховуючи те, що функції симуляції інтегровані в систему, потенційний користувач не має необхідності купувати додаткові програмні продукти для перевірки керуючих програм, вартість яких часто порівнювана з усією системою SprutCAM.
Модуль симуляції обробки надає такі можливості:
- Моделювання багатокоординатної обробки з урахуванням руху всіх вузлів верстата згідно з його кінематичної схемою.
- Реалістична емуляція процесу обробки.
- Висока достовірність моделі обробленої деталі дозволяє наочно оцінити якість обробки і виявити можливі недоліки.
- Режими перегляду неповністю оброблених ділянок та ділянок врізання в модель (наприклад, при встановленні негативного припуску або низької точності обробки).
- Можливість порівняння обробленої деталі з вихідною моделлю.
- Візуальний контроль залишкового матеріалу.
- Відпрацювання корекції на радіус і довжину інструменту при моделюванні.
|

















