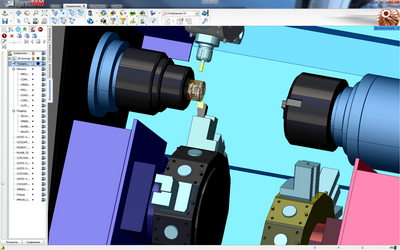
Токарно-фрезерна обробка
SprutCAM забезпечує можливість розробки керуючих програм для будь-яких типів токарно-фрезерного обладнання, в тому числі з протишпинделем. Підтримуються схеми верстатів з будь-яким розташуванням і кількістю інструментальних систем. Керуюча програма в цьому випадку представляє собою комбінацію токарних і фрезерних переходів. Доступні всі стратегії токарної і 2,5-5-координатної фрезерної обробки.

Токарно-фрезерна обробка передбачає обробку деталі на токарно-фрезерних верстатах, коли за один установ можуть здійснюватися і токарні, і фрезерні переходи.
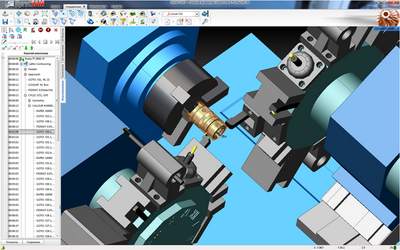
Управління всіма робочими органами верстата
SprutCAM дозволяє розробляти керуючі програми для будь-яких типів токарно-фрезерних верстатів без обмежень за кількістю осей та виконавчих органів верстата, до яких можна віднести: револьверні головки, фрезерні головки, токарні протишпінделі, люнети, уловлювачі готових деталей, завантажувачі заготовок, пристрої налагодження інструменту та ін.
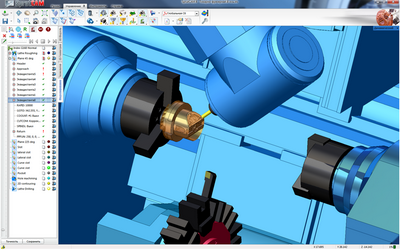
Токарні операції
SprutCAM пропонує широкий вибір стратегій точіння, розточування, свердління, в тому числі: чорнові токарні цикли, цикли чистової обробки, цикли обробки канавок, цикли нарізання всіх видів різьблень як на циліндричних, так і на конічних поверхнях, точіння гвинтових поверхонь довільного перерізу з постійним і змінним кроком, цикли обробки отворів з використанням як інструменту від провідних виробників, так і спеціального інструменту власного виготовлення. Для здійснення оптимальної обробки деталей з використанням осі B користувачеві надається зручний механізм управління кутом нахилу різця до поверхні деталі.
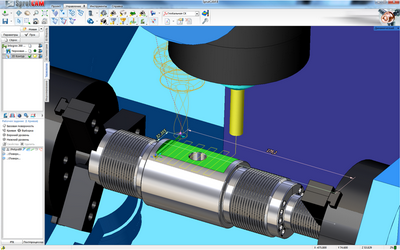
Фрезерні операції
Підтримуються всі способи чорнової і чистової фрезерної обробки, застосовувані на звичайних фрезерних верстатах.
SprutCAM дозволяє здійснювати розробку керуючих програм з використанням осей С і Y для обробки як в головному шпинделі, так і в протишпинделі, як на зовнішньому діаметрі деталі, так і на її торці. Якщо верстат оснащений віссю В, то підтримується індексна фрезерна обробка деталі в похилих площинах, а також одночасна п’ятиосьова обробка з використанням всіх осей верстата.
Коли верстат не має в своєму арсеналі осі Y, тоді для фрезерування торця деталі SprutCAM надає можливість проводити розрахунок керуючої програми в полярних координатах. Крім того, якщо верстат містить вбудовані функції для перерахунку переміщень з декартової в полярну систему координат, SprutCAM виводить в керуючу програму всі необхідні для цього команди.
Для фрезерування по циліндричній поверхні з використанням безперервного переміщення по осі С можна використовувати циліндричну систему координат.
Допоміжні операції
Сучасні верстати з ЧПУ характеризуються значним різноманіттям процедур управління робочими органами, такими як: перехоплення деталі в протишпиндель і назад в головний шпиндель, точіння довгих деталей, затиснутих в два шпинделі, використання люнета, використання задньої бабки, використання пристрою подачі прутка, уловлювачів (виштовхувачів) готових деталей, завантажувачів заготовок. Верстати мають власні правила і команди управління всім арсеналом робочих органів. SprutCAM надає можливість користувачеві самостійно одного разу сформувати закінчені операції управління будь-якими виконавчими органами верстата, запам'ятати їх і включити в список для використання в подальшому. До таких операцій можна віднести, наприклад, «Операція перехоплення», «Захоплення обробленої деталі протишпінделем і відрізка», «Підтиск деталі люнетом», «Підтиск деталі центром задньої бабки», «Вивантаження готової деталі в уловлювач», «Автоматична установка заготовки в шпиндель» тощо. Всі параметри, які необхідно задати в цих операціях, визначаються автоматично при формуванні наладки на етапі розробки керуючої програми в SprutCAM.
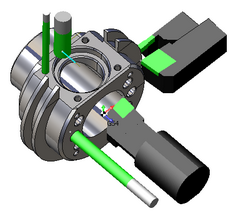
Моделювання обробки
Моделювання обробки на етапі розробки керуючих програм дозволяє точно відстежити всі переміщення виконавчих органів верстата з урахуванням вильоту всього ріжучого інструменту, встановленого в револьверні головки верстата, на предмет колізій і зіткнень. Крім демонстрації самої обробки деталі, система надає можливість спостерігати всі переміщення виконавчих органів верстата при відпрацюванні допоміжних операцій, створених користувачем, таких як «Операція перехоплення в протишпиндель», «Захоплення обробленої деталі протишпинделем і відрізка», «Підтиск деталі люнетом» та ін.
Система моделювання обробки здійснює автоматичний контроль зіткнень ріжучого інструменту з усіма елементами конструкції верстата, а також контроль зіткнень всіх виконавчих органів між собою.
|